视觉SLAM学习笔记:四
第五章
相机模型
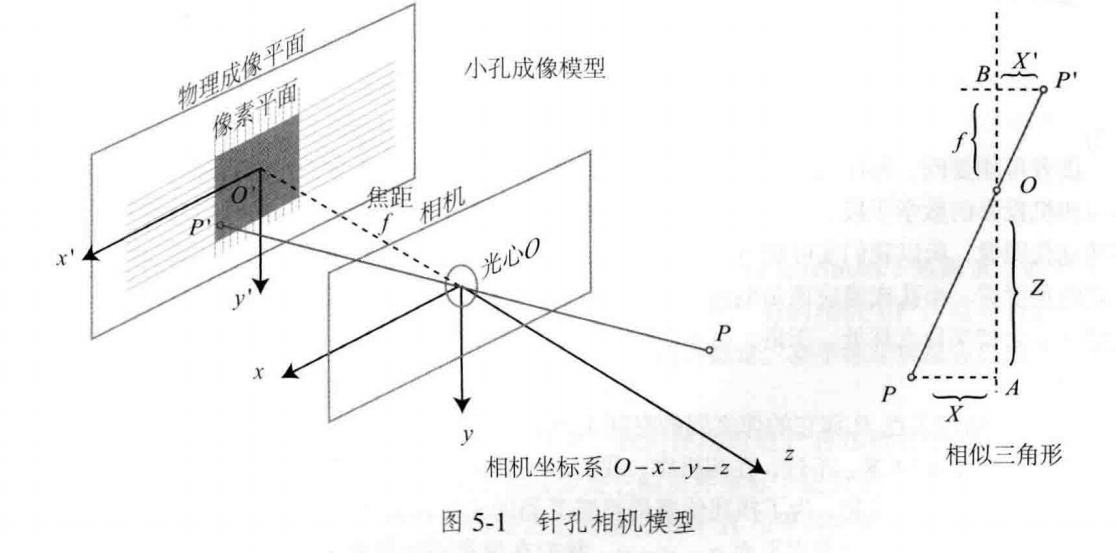
针孔相机模型
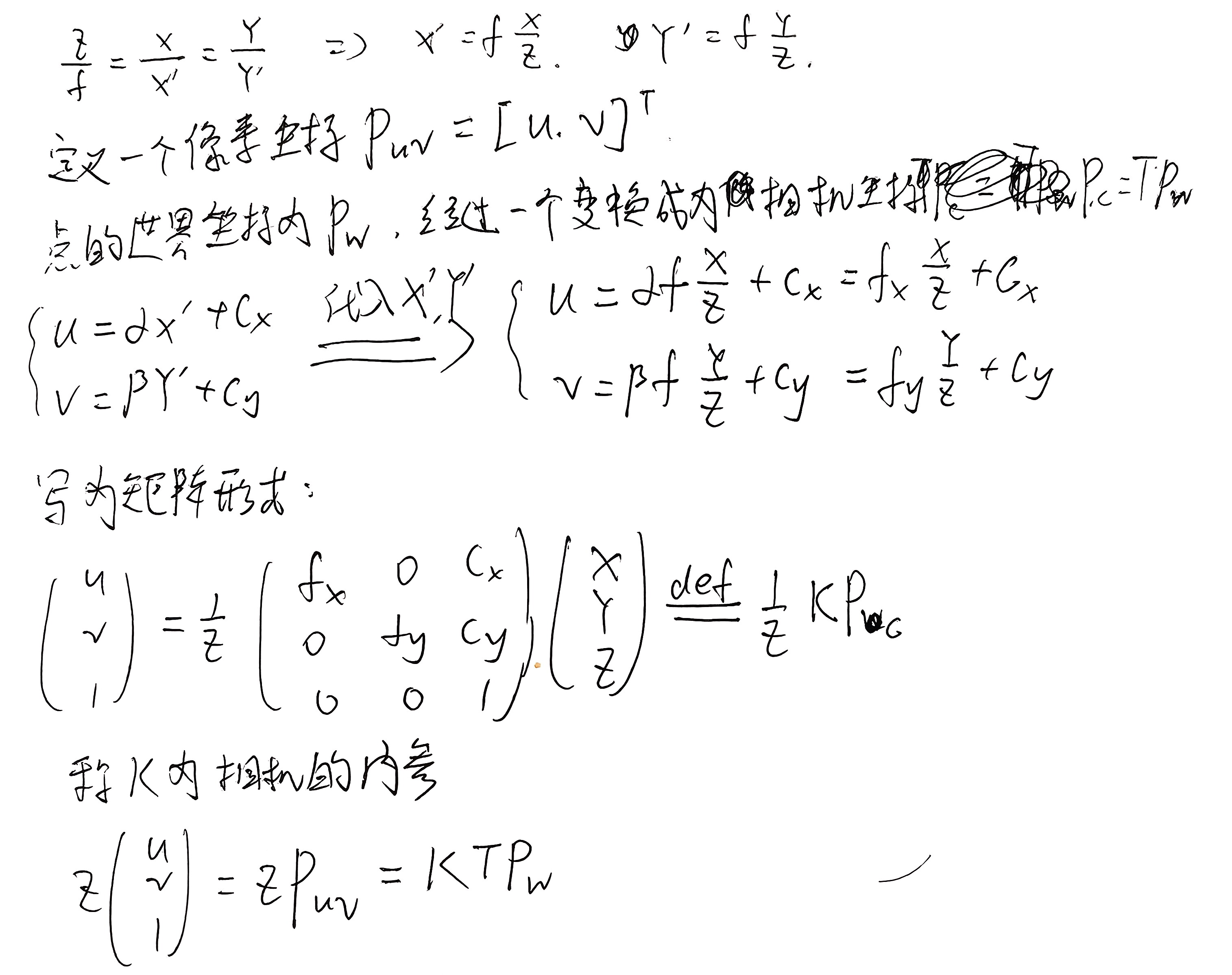
畸变模型
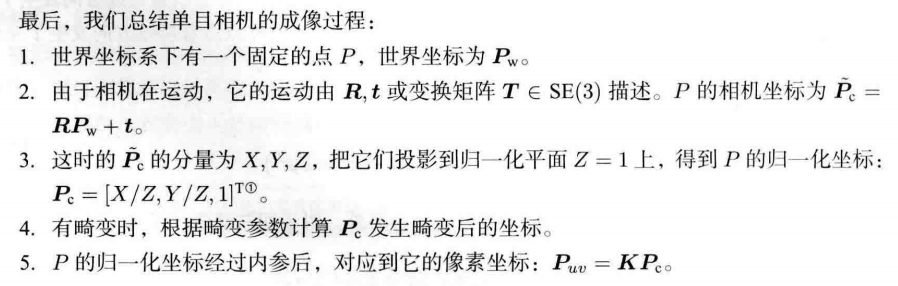
单目相机成像过程

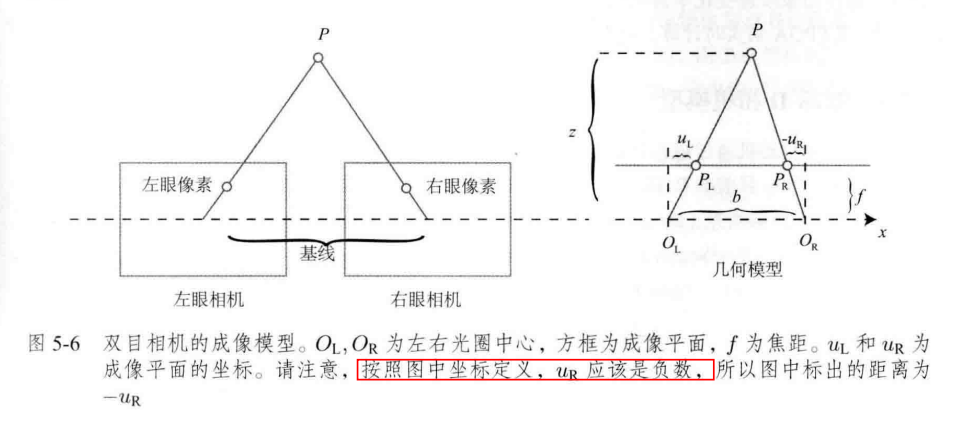
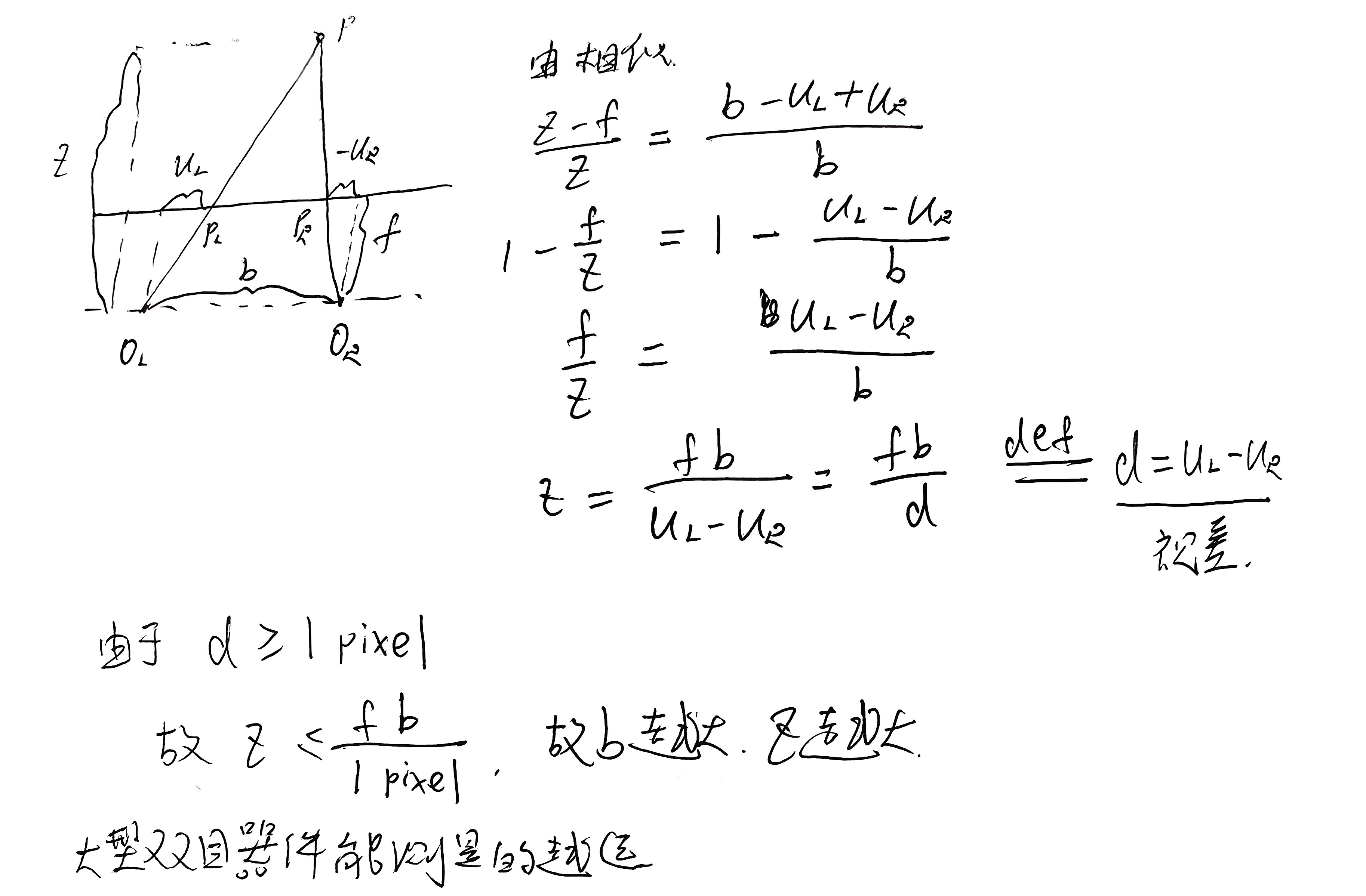
双目相机模型
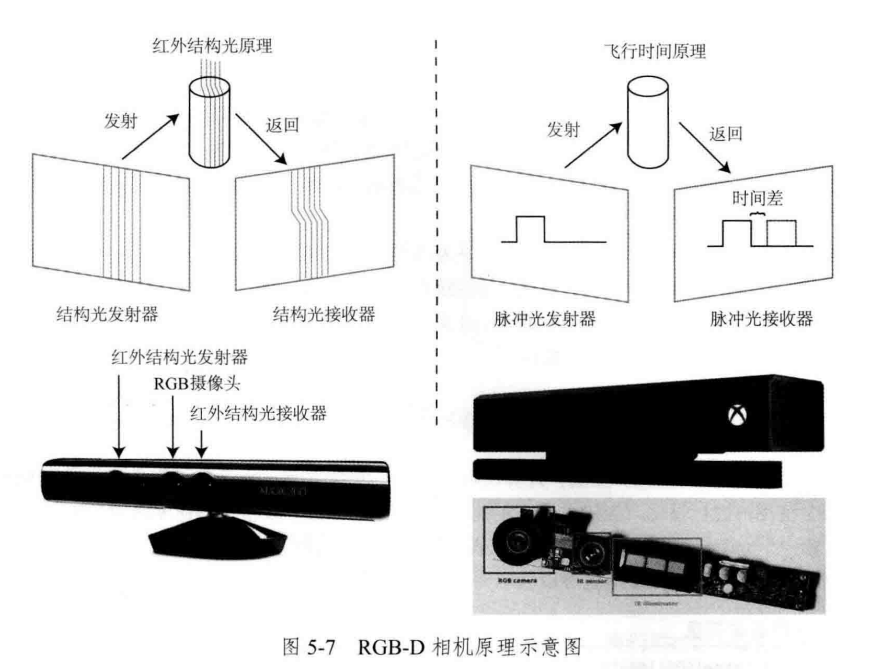
RGB-D相机模型
习题

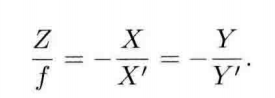
内参就是个$K$:$$K=\left[\begin{matrix}
f_{x} & 0 & c_{x} \\ 0 & f_{y} & c_{y} \\ 0 & 0 & 1
\end{matrix}\right]$$
如果相机的分辨率变为原来的两倍,那么$u$和$v$就会变成原来的两倍,由于:$$Z \left[\begin{matrix}
u \\ v \\ 1
\end{matrix} \right]= \left[\begin{matrix}
f_{x} & 0 & c_{x} \\ 0 & f_{y} & c_{y} \\ 0 & 0 & 1
\end{matrix}\right] \left[\begin{matrix}
X \\ Y \\ Z
\end{matrix}\right]$$
故$$Z \left[\begin{matrix}
2u \\ 2v \\ 1
\end{matrix} \right]= \left[\begin{matrix}
2f_{x} & 0 & 2c_{x} \\ 0 & 2f_{y} & 2c_{y} \\ 0 & 0 & 1
\end{matrix}\right] \left[\begin{matrix}
X \\ Y \\ Z
\end{matrix}\right]$$
所以内参就变为了:$$\left[\begin{matrix}
2f_{x} & 0 & 2c_{x} \\ 0 & 2f_{y} & 2c_{y} \\ 0 & 0 & 1
\end{matrix}\right]$$
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.